You-Jun Li, , Bang-Shien Chen, Chih-Wei Huang, Jann-Long Chern, Ching-Cherng Sun, Open-Vocabulary Semantic Segmentation for Dynamic 3D Scenes Using Scene Flow Estimation. IEEE Robotics and Automation Letters (RA-L), vol. 11, no. 7, pp. 8140 -- 8147, Jul. 2026.
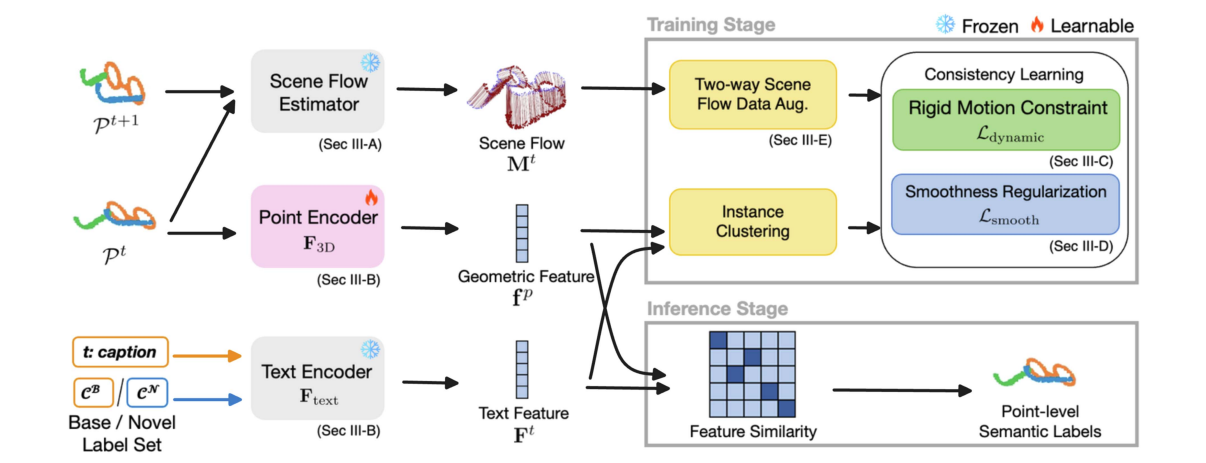
3D open-vocabulary semantic segmentation has shown great potential in applications such as autonomous driving and mixed reality. However, achieving accurate segmentation in dynamic environments remains challenging due to motion-induced inconsistencies. To address this issue, we incorporate scene flow as temporal information into a static semantic backbone to enhance semantic consistency and accuracy over time. Our method captures inter-frame motion cues from point cloud sequences and leverages them, together with a local clustering mechanism, to refine semantic label consistency in consecutive frames. Furthermore, we introduce a two-way scene flow-based data augmentation strategy that exploits both forward and backward motion to jointly train the model in bidirectional temporal contexts. On the large-scale nuScenes autonomous driving dataset, our method achieves a 0.4% overall improvement in hIoU and a 2.37% gain under high-motion scenes. On the synthetic object-centric dataset, it achieves a 4.53% overall hIoU improvement and a 6.09% gain in high-motion scenes, while reducing the ID switch rate by 0.5%.
For more details, please refer to the following links: