The KCP-TEASER registration approach. More...
#include <kcp/solver.hpp>
Classes | |
| struct | Params |
| Type of parameters for the KCP-TEASER solver. More... | |
Public Types | |
| using | TEASER = teaser::RobustRegistrationSolver |
| Type alias of the TEASER++ solver. | |
Public Member Functions | |
| KCP (KCP::Params params) | |
| Construct a new KCP object. More... | |
| KCP::Params & | get_params () |
| Get the parameters. More... | |
| const Correspondences & | get_initial_correspondences () const |
| Get the initial set of correspondences. More... | |
| const std::vector< int > & | get_inlier_correspondence_indices () const |
| Get the inlier correspondence indices. More... | |
| virtual void | solve (const Eigen::MatrixX3d &src, const Eigen::MatrixX3d &dst, const Eigen::MatrixXd &src_feature, const Eigen::MatrixXd &dst_feature) override |
| The main function to trigger the KCP-TEASER registration approach. More... | |
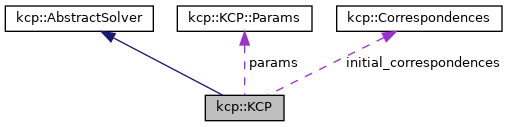
 Public Member Functions inherited from kcp::AbstractSolver Public Member Functions inherited from kcp::AbstractSolver | |
| AbstractSolver () | |
| Constructor. | |
| virtual const Eigen::Matrix4d & | get_solution () const |
| Get the solution of the registration. More... | |
Protected Attributes | |
| TEASER | solver |
| The TEASER++ solver. | |
| KCP::Params | params |
| Parameters for the KCP-TEASER solver. | |
| Correspondences | initial_correspondences |
| The initial set of k-closest-points correspondences. | |
| std::vector< int > | inlier_correspondence_indices |
The inlier correspondence indices with respect to initial_correspondences. The set is estimated by the maximum clique pruning method. | |
| Protected Attributes inherited from kcp::AbstractSolver | |
| Eigen::Matrix4d | solution |
| The estimation result. | |
Detailed Description
The KCP-TEASER registration approach.
KCP is an efficient and effective local point cloud registration approach targeting for real-world 3D LiDAR scan matching problem. A simple (and naive) understanding is: ICP iteratively considers the closest point of each source point, but KCP considers the k closest points of each source point in the beginning, and outlier correspondences are mainly rejected by the maximum clique pruning method (provided by TEASER++).
- See also
- Yu-Kai Lin, Wen-Chieh Lin, Chieh-Chih Wang, KCP: k-Closest Points and Maximum Clique Pruning for Efficient and Effective 3D Laser Scan Matching. To appear in IEEE Robotics and Automation Letters (RA-L), 2022.
Constructor & Destructor Documentation
◆ KCP()
|
inline |
Construct a new KCP object.
- Parameters
-
params KCP-TEASER parameters.
Member Function Documentation
◆ get_initial_correspondences()
|
inline |
Get the initial set of correspondences.
- Returns
- const Correspondences& Initial set of correspondences.
◆ get_inlier_correspondence_indices()
|
inline |
Get the inlier correspondence indices.
- Returns
- const std::vector<int>& Inlier correspondence indices.
◆ get_params()
|
inline |
Get the parameters.
- Returns
- Parameters.
◆ solve()
|
overridevirtual |
The main function to trigger the KCP-TEASER registration approach.
- Parameters
-
src The source point cloud. dst The target point cloud. src_feature The source feature cloud. dst_feature The target feature cloud.
Implements kcp::AbstractSolver.
The documentation for this class was generated from the following files:
- kcp/include/kcp/solver.hpp
- kcp/src/solver.cpp